Tuotteemme

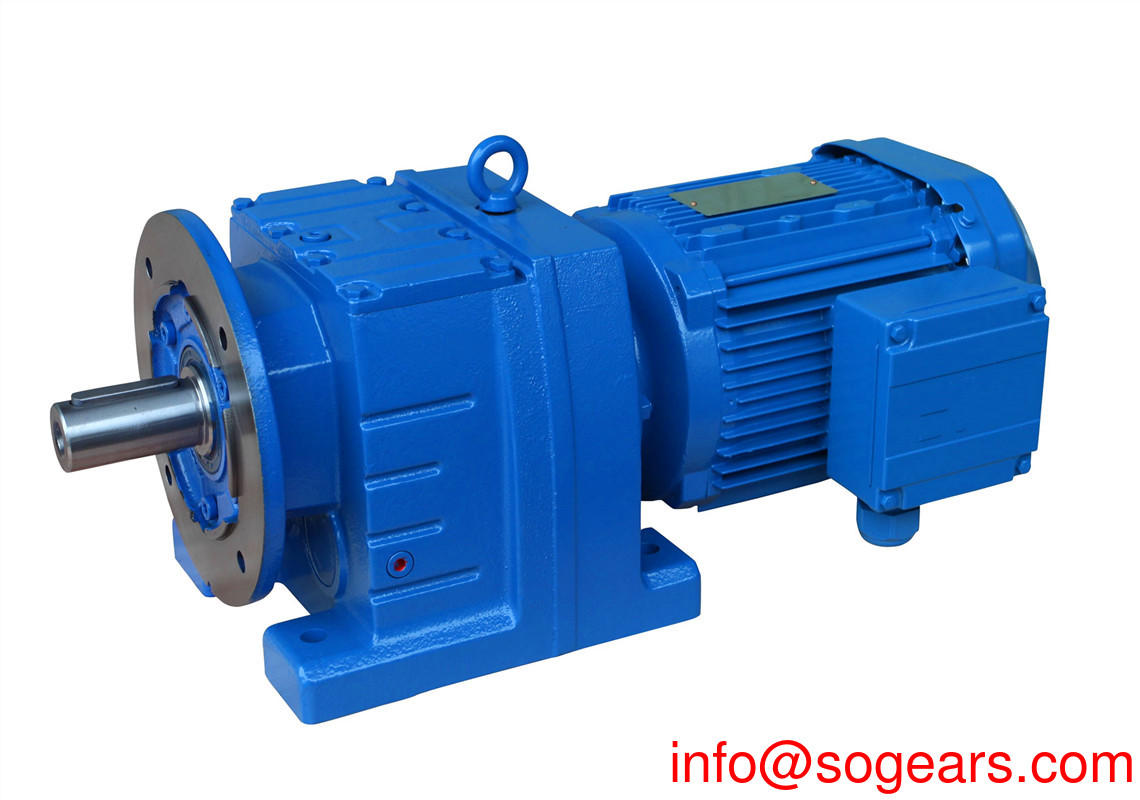
Askelmoottori planeettavaihteisto
- askelmoottori planeettavaihteisto on rakennettu pääasiassa aurinkovaihteella, planeettavaihteella, sisärenkaalla ja planeettatelineellä.
Kolmen planeettapyörän kuormituksen jakamiseksi tasaisesti käytetään hammastettua kelluvaa mekanismia, toisin sanoen aurinkovaihde tai planeetan kannatin kelluu, tai sekä aurinkovaihde että planeetan kannatin kelluvat samanaikaisesti. Askelmoottorin planeettavaihteiston hammaspyörät ovat suorahampaisia sylinterimäisiä hammaspyöriä. Sillä on seuraavat ominaisuudet:
- Pieni koko ja kevyt. Samoissa olosuhteissa se on 1 / 2 tai enemmän kevyempi kuin tavallinen pyöreä sylinterimäinen vaihdelaatikko, ja tilavuus on 1 / 2 - 1 / 3.
2, voimansiirtotehokkuus on korkea: yksivaiheisen askelmoottorin planeettavaihteisto saavuttaa 97% ~ 98%; kaksivaiheinen askelmoottorinen planeettavaihteisto saavuttaa 94% ~ 96%; kolmivaiheinen askelmoottori planeettavaihteisto 91% ~ 94%.
3, lähetystehoalue on suuri: voi olla alle 1KW - 1300KW tai jopa suurempi.
4, lähetysalue on suuri: i = 2.8 ~ 2000
5, mukautuvuus ja kestävyys. Pääosat on valmistettu korkealaatuisesta seosteräksestä karburoimalla ja sammuttamalla tai nitridoimalla. Askelmoottorinen planeettavaihteisto toimii tasaisesti, melu alhaisella tasolla ja sitä käytetään yli 10 kertaa.
6, käyttö ja sovellettavat ehdot

- askelmoottori planeettavaihteisto siinä on kolme vaakasarjaa (NGW11-NGW121) ja kaksi tasoa (NGW42-NGW122) kolme (NGW73-NGW123). Sitä käytetään pääasiassa metallurgiassa, kaivos-, nosto- ja kuljetuskoneissa ja -laitteissa, ja sitä voidaan käyttää myös voimansiirtoon muissa vastaavissa teollisuus- ja kaivosolosuhteissa.


Servo-planeettavaihteiston nimellinen sisääntulonopeus 18000 RPM: iin saakka (itse askelmoottorin planeettavaihteiston koko on, sitä suurempi askelmoottorin planeettavaihteisto on, sitä pienempi nimellinen syöttönopeus) edellä, teollisuusluokan servo-planeettavaihteiston lähtömomentti ei yleensä ole suurempi kuin 2000 nm, erityinen suuri vääntömomentti servo-planeettavaihteisto voi tehdä enemmän kuin 10000 nm. Käyttölämpötila välillä 25 ℃ - 100 ℃ tai niin, rasvaa vaihtamalla voi muuttaa sen käyttölämpötilaa.
Servo-planeettavaihteiston käyttölämpötila on yleensä välillä -25 ℃ - noin 100 ℃. Suurin syöttönopeus voi saavuttaa 18000rpm-käyttöiän. Nimellisen tulonopeuden kumulatiivinen työaika on zbj19004-88 ja zbj19026-90 kohina ≤70 db
hakemisto
1 askelmoottorin planeettavaihteisto
2-asennusmenetelmä
3 tärkeät parametrit
4-konsepti
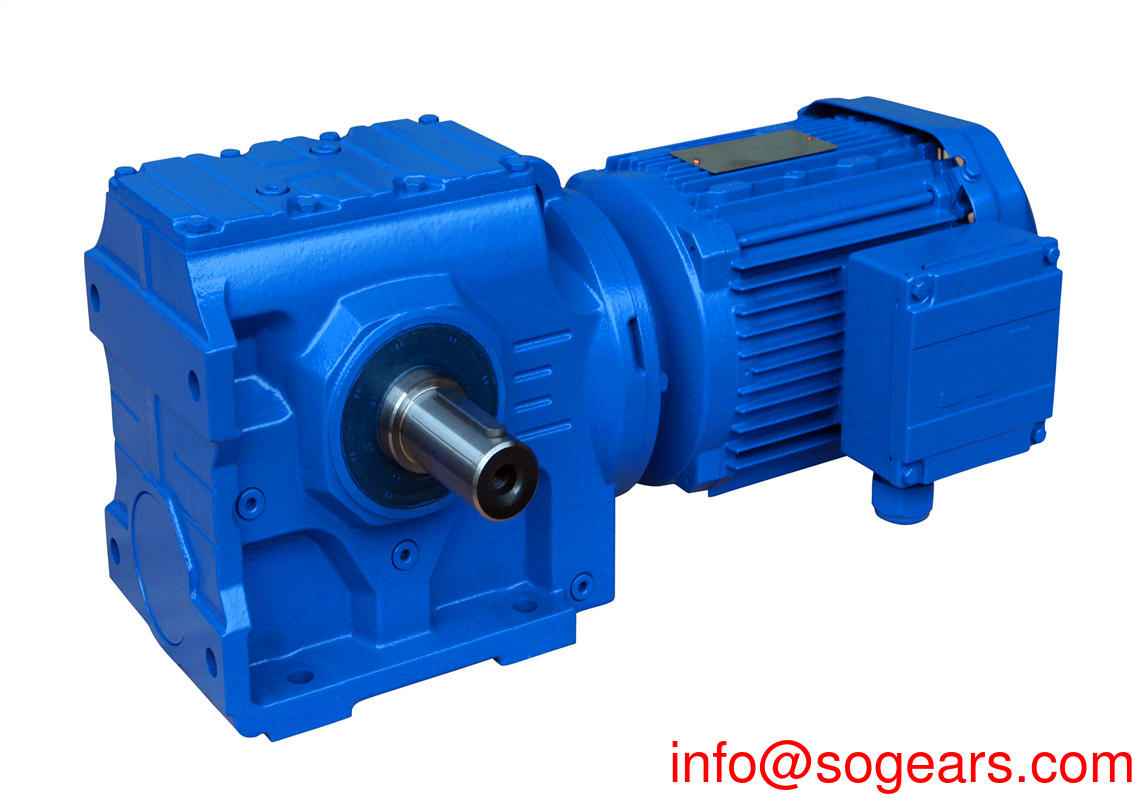
askelmoottori planeettavaihteisto

Tärkein voimansiirtorakenne on: planeettapyörä, aurinkorengas, ulkovaihderengas.Verrattuna muihin vaihdelaitteisiin, servomoottorien alennusvaihteilla on suuri jäykkyys, korkea tarkkuus (yhden vaiheen avulla voidaan saavuttaa vähemmän kuin 1-piste), (kaksivaiheinen voi saavuttaa vähemmän kuin 3-pisteet), korkea siirtotehokkuus (yksivaiheinen 95-99%) , korkea vääntömomentin / tilavuuden suhde, käyttöiän ylläpitämättömät ominaisuudet.
Näiden ominaisuuksien takia servo-planeettavaihteisto asennetaan enimmäkseen askelmoottoriin ja servomoottoriin tai harjattomaan moottoriin, joita käytetään nopeuden pienentämiseen, vääntömomentin parantamiseen ja inertin vastaavuuteen.
Servo-planeettavaihteiston nimellinen syöttönopeus voi nousta 18000rpm: iin (suhteessa itse askelmoottorin planeettavaihteiston kokoon, mitä suurempi askelmoottorin planeettavaihteisto, sitä pienempi nimellinen syöttönopeus) yllä, teollisuusluokan servoplanetaarion lähtömomentti vaihdelaatikko ei yleensä ylitä 2000Nm

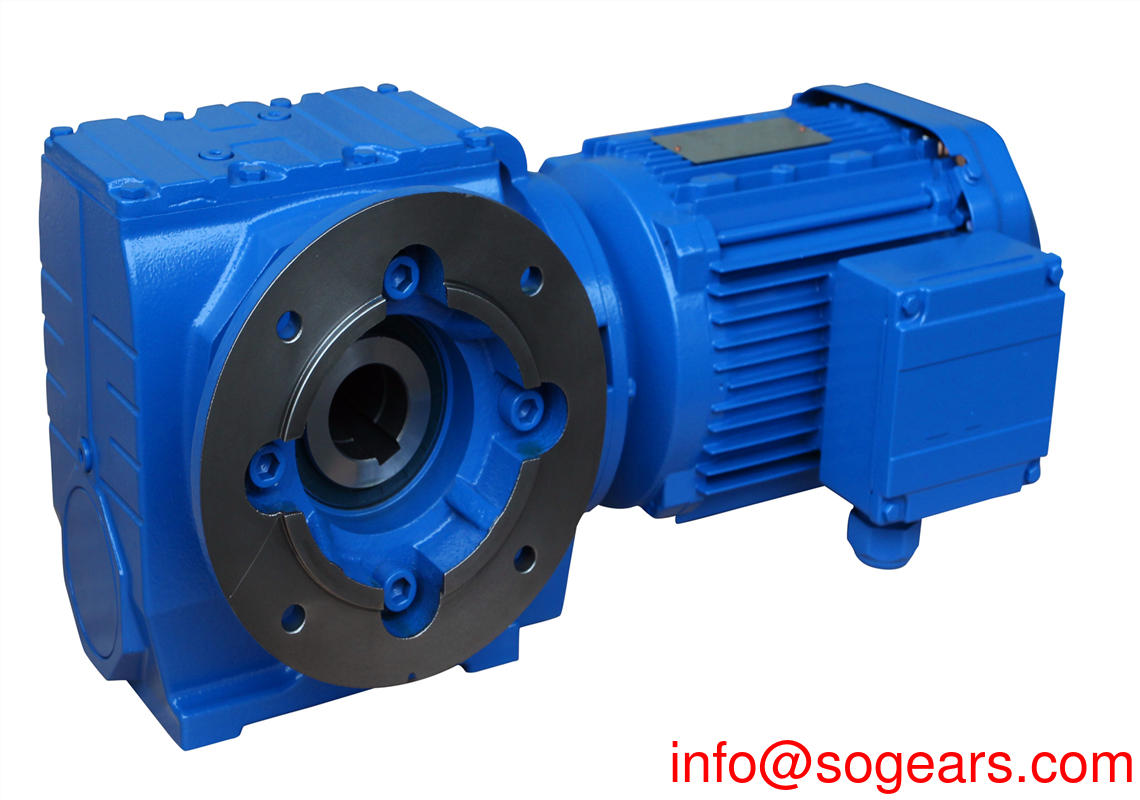
Asennustapa
Askelmoottorin planeettavaihteiston oikea asennus, käyttö ja huolto on tärkeä linkki mekaanisten laitteiden normaalin toiminnan varmistamiseksi.Siksi asentaessasi askelmoottorin planeettavaihteistoa, muista noudattaa tiukasti seuraavia asennuksia ja niihin liittyviä asioita, koota ja käytä huolellisesti.
Ensimmäinen askel on varmistaa ennen moottorin asennusta, onko moottorin ja askelmoottorin planeettavaihteisto hyvässä kunnossa, ja tarkistaa tiukasti, että moottorin ja askelmoottorin planeettavaihteistoon kytkettyjen osien koko on sovitettu yhteen. Tässä on moottorin sijoituspuolen, syöttöakselin ja askelmoottorin planeettavaihteiston uran koko ja vastaava toleranssi.
Vaihe 2: ruuvaa ruuvit askelmoottorin planeettavaihteiston laipan ulkoiseen pölynpitävään reikään, säädä PCS-järjestelmän kiristysrengas kohdistaaksesi sivureiän pölytiivis reikään, aseta sisäpuolinen kuusikulmio kiristämiseen.Poista sen jälkeen moottorin akselin avaimet.Kolmas vaihe on kytkeä moottori askelmoottorin planeettavaihteistoon luonnollisesti.Askelmoottorin planeettavaihteiston lähtöakselin ja moottorin sisääntuloakselin on oltava keskittyneinä yhdenmukaisia, ja näiden kahden laipan on oltava yhdensuuntaiset.Jos keskittymä ei ole tasaista, moottorin akseli rikkoutuu tai askelmoottorin planeettavaihteiston vaihde kuluu.Älä myöskään asennuksessa käytä vasaraa tai muita iskuja, estä aksiaalivoima tai radiaalivoima liian paljon vaurioita laakeriin tai hammaspyörään.


Kiristä asennuspultti ennen kiristämistä.Pyyhi ennen asennusta moottorin sisääntuloakselin ruosteenestoöljy, asemointipylväs ja askelmoottorin planeettavaihteiston liitäntäosa bensiinillä tai sinkkinatriumvedellä.Sen tarkoituksena on varmistaa tiukka kytkentä ja toiminnan joustavuus sekä estää tarpeeton kuluminen.Ennen kuin moottori ja askelmoottorin planeettavaihteisto kytketään, moottorin akselin kiilaura tulee olla kohtisuorassa kiristyspulttiin nähden.Tasaisen voiman varmistamiseksi ruuvaa ensin asennuspultit mihin tahansa diagonaaliseen asentoon, mutta älä ruuvaa tiukasti kiinni, ruuvaa sitten asennuspultit kahdessa muussa diagonaaliasennossa ja lopulta ruuvaa neljä asennuspulttia yksi kerrallaan.Kiristä lopuksi voimapultti.Kaikki kiristyspultit on kiinnitettävä ja tarkistettava momenttilevyn kädellä ilmoitettujen vääntömomenttitietojen mukaisesti.
Oikea asennus askelmoottorin planeettavaihteiston ja mekaanisten laitteiden välillä on sama kuin oikea asentaminen askelmoottorin planeettavaihteiston ja käyttömoottorin väliin.Tärkeintä on varmistaa, että askelmoottorin planeettavaihteiston lähtöakseli ja akselin käyttöosa ovat samankeskeisiä.
Tärkeä parametri
Hidastuvuussuhde: tulonopeuden ja ulostulonopeuden suhde.
Sarja: planeettavaihteiden sarja.Yleensä maksimiarvo voi olla kolme, tehokkuus heikkenee.
Täysi kuormitusteho: askelmoottorin planeettavaihteiston voimansiirtotehokkuus maksimikuormituksen alaisena (vianpysähdyksen vääntömomentti).
Käyttöikä: askelmoottorin planeettavaihteiston kumulatiivinen työaika nimelliskuormalla ja nimellisnopeudella.
Nimellismomentti: Vääntömomentti, jonka nimellinen käyttöikä mahdollistaa pitkän käyttöajan.Kun lähtönopeus on 100 r / min, askelmoottorin planeettavaihteiston käyttöikä on keskimääräinen käyttöikä, tämän arvon ylittäessä, askelmoottorin planeettavaihteiston keskimääräinen käyttöikä lyhenee.Askelmoottorin planeettavaihteisto epäonnistuu, kun lähtömomentti ylittää kaksi kertaa.
Melu: yksikkö dB (A), tämä arvo on tulonopeus 3000 r / min, ei kuormitusta, 1 m päässä askelmoottorin planeettavaihteiston mitatusta arvosta.

Sarja: planeettavaihteiden sarja. Koska yksi planeettavaihteisto ei voi täyttää suuremman siirtosuhteen vaatimuksia, joskus tarvitaan kaksi tai kolme sarjaa suuremman välityssuhteen tukemiseksi. Planeettavaihteiden lukumäärän kasvun vuoksi toisen tai kolmannen askelmoottorin planeettavaihteiston pituutta lisätään ja hyötysuhde vähenee.
Paluuvälys: Kun lähtöpää on kiinteä ja tulopäää kierretään myötäpäivään ja vastapäivään nimellismomentin tuottamiseksi + -2% tulopäässä, askelmoottorin planeettavaihteiston tulopäässä on pieni kulmamuutos, joka on palautuslomake.
Servomoottori on moottori, joka ohjaa servojärjestelmässä käyviä mekaanisia komponentteja. Se on lisämoottorin epäsuora nopeudenmuutoslaite.

Servomoottori voi hallita nopeutta, paikannustarkkuus on erittäin tarkka, jännitesignaali voidaan muuntaa vääntömomentiksi ja nopeudeksi ohjausobjektin ohjaamiseksi.Servomoottorin roottorin nopeutta säädetään tulosignaalilla ja se voi reagoida nopeasti. Sitä käytetään automaattisen ohjausjärjestelmän toimeenpanoelementtinä ja sillä on pienen sähkömekaanisen aikavakion, suuren lineaarisuuden ja käynnistysjännitteen ominaisuudet jne. Vastaanotettu sähköinen signaali voidaan muuntaa moottorin akselin kulmasiirtoon tai kulmanopeuden ulostuloon.Jakattuna tasa- ja vaihtovirtamoottorimoottoreihin, sen pääominaisuudet ovat, että kun signaalijännite on nolla, ei ole kiertoilmiötä, nopeutta vääntömomentin kasvaessa ja tasaista laskua.
Perustiedot
kiinalainen nimi
servomoottori
Ulkomaiset nimet
servomoottori
tyyppi laitteet
Käytä tilaisuuksia
Automaattinen ohjausjärjestelmä

hakemisto
1-toimintaperiaate
2-kehityshistoria
3-valintavertailu
4-virheenkorjausmenetelmä
5 suorituskyvyn vertailu
6-valintalaskelma
7 jarrutila
8 kiinnittää huomiota
Ominaisuuksien vertailu 9
10-käyttöalue
11-päätoiminnot
12-edut
Muuta tämän osan toimintaperiaate taitella
1. Servomekanismia käytetään paikan, suunnan,

Automaattinen ohjausjärjestelmä, jossa lähdön ohjaama määrä, kuten tila, voi seurata mielivaltaisia muutoksia tulokohteessa (tai annetussa arvossa).Servoasennus pulssilla, pohjimmiltaan ymmärtää sen, servomoottori vastaanottaa pulssin, pyörittää yhtä pulssia vastaavasta näkökulmasta siirtymän toteuttamiseksi, koska itse servomoottorin toiminnalla on pulssi, joten jokaisella servomoottorin pyörimiskulma, lähetä vastaava määrä pulsseja tällä tavalla ja servomoottori vastaanottamaan kaikua muodostavan pulssin tai suljetun silmukan, minkä seurauksena järjestelmä tietää kuinka monta pulssia lähetetään servomoottorille , kuinka paljon varauspulssia takaisin samanaikaisesti, tällä tavalla, voi olla erittäin tarkka moottorin pyörimisnopeuden hallinta, jotta tarkan asemoinnin saavuttamiseksi voidaan saavuttaa 0.001 mm.DC-servomoottori on jaettu harja- ja harjattomaan moottoriin.Harjamoottori edullinen, yksinkertainen rakenne, suuri käynnistysmomentti, laaja nopeusalue, helppo hallita, tarvitsevat huoltoa, mutta huolto ei ole kätevää (hiiliharja), sähkömagneettiset häiriöt, ympäristövaatimukset.Sitä voidaan siksi käyttää kustannusherkissä yleisissä teollisuus- ja siviilikäytössä.



Harjaton moottori pieni koko, kevyt, suuri lähtö, nopea vaste, nopea nopeus, pieni hitaus, tasainen kierto, vakaa vääntömomentti.Ohjaus on monimutkaista, helppo toteuttaa älykkyyttä, ja elektroninen kommutointi on joustavaa, mikä voi olla neliö- tai siniaaltokommutaatio.Moottorin huoltovapaa, korkea hyötysuhde, matala käyttölämpötila, pieni sähkömagneettinen säteily, pitkä käyttöikä, voidaan käyttää monissa ympäristöissä.
2, ac-servomoottori on harjaton moottori, jaettu synkroniseen ja asynkroniseen moottoriin, nykyistä liikkeenohjausta käytetään yleensä synkronimoottorina, sen tehoalue on suuri, voi tehdä paljon voimaa.Suuri hitaus, matala suurin pyörimisnopeus ja tehon kasvaessa pienenevät nopeasti.Siksi se sopii hitaalle ja sujuvalle toiminnalle.
3. Servomoottorin sisällä oleva roottori on kestomagneetti. Kuljettajan ohjaama kolmivaiheinen sähkö, U / V / W, muodostaa sähkömagneettisen kentän.Servomoottorin tarkkuus riippuu kooderin (linjanumero) tarkkuudesta.
Kehityshistoria
Saksan Rexroth-yhtiön Indramat-divisioonan jälkeen MANNESMANN 1978 Hanover -messuilla

MAC-kestomagneetti ac-servomoottori ja käyttöjärjestelmä otettiin virallisesti käyttöön Shanghaissa, mikä merkitsi, että tämä uusi sukupolven ac-servoteknologia on tullut käytännön vaiheeseen.1980: n puoliväliin ja loppuosaan mennessä yrityksillä oli täydellinen tuotevalikoima.Koko servomarkkinat ovat siirtyneet vaihtovirtajärjestelmiin.Varhaiset simulaatiojärjestelmät, kuten nollapoikkeama, häiriöidenvastaisuus ja luotettavuus, tarkkuus ja joustavuus, samoin kuin riittämättömät, eivät täysin vastaa liikkeenhallinnan vaatimuksia. Viime vuosina mikroprosessorina uuden tyyppisen digitaalisen signaaliprosessorin (DSP) käyttö ), digitaalinen ohjausjärjestelmä, ohjausosa voidaan suorittaa täysin ohjelmistolla, nimeltään dc servo system, kolmivaiheinen kestomagneetti ac servojärjestelmä.

Tähän saakka suurin osa korkean suorituskyvyn sähköisistä servojärjestelmistä käyttää pysyviä magneettisynkronisia vaihtovirran servomoottoreita, kun taas suurin osa ohjaimista käyttää nopeita ja tarkkoja digitaalisia paikkoja servojärjestelmiä.Tyypillisiä valmistajia ovat saksalainen Siemens, yhdysvaltalainen kohlmorgen ja japanilainen panasonic ja yaskawa.
Pieni ac-servomoottori ja kuljettaja ovat yaskawa-moottorin tuottamia Japanissa. Niistä D-sarja sopii CNC-työstökoneisiin (suurin nopeus on 1000r / min, vääntömomentti on 0.25 ~ 2.8n.m) ja R-sarja sopii robotteihin (suurin nopeus on 3000r / min, vääntömomentti on 0.016 ~ 0.16n.m) ).Sen jälkeen johdettiin kuusi M, F, S, H, C ja G sarjaa.Uusi D- ja R-sarja esiteltiin 1990-malleissa.Vanhasta suorakulmaisen aaltoaseman sarjasta, 8051 MCU -ohjauksesta sinimuotoiseen aaltoasemaan, 80C, 154CPU ja porttiryhmän sirun ohjaukseen, vääntömomentin vaihteluun 24%: sta 7%: iin, ja paranna luotettavuutta.Tällä tavalla vain muutama vuosi muodostaa kahdeksan sarjaa (tehoalue 0.05 ~ 6kW) suhteellisen täydelliseksi järjestelmäksi, joka täyttää työskentelykoneet, käsittelymekanismit, hitsausrobotit, kokoonpanobotit, elektroniset komponentit, prosessikoneet, painokone, korkea- nopeuskäämityskone, käämikone ja muut tarpeet.
Fanuc, japanilainen yritys, joka tunnetaan CNC-työstökoneiden tuottamisesta, esitteli myös s-sarjan (13 tekniset tiedot) ja l-sarjan (5 tekniset tiedot) kestomagneetti-AC-servomoottorit 1980: n puoliväliin.L-sarjassa on pieni hitausmomentti ja mekaaninen aikavakio, ja se sopii erityistä nopeaa reagointia vaativiin servosysteemijärjestelmiin.

Muut japanilaiset valmistajat, kuten mitsubishi-moottorit (hc-kfs, hc-mfs, hc-sfs, hc-rfs ja hc-ufs -sarjat), Toshiba seiki (SM-sarja), okuma rautateokset (BL-sarja), sanyo electric (BL sarja) ja rishi electric (S-sarja) ovat myös osallistuneet pysyvien magneettien vaihtovirran servojärjestelmän kilpailuun.
Rexrothin Indramat-divisioonan MAC-sarjan vaihtovirran servomoottoreilla on 7-kehyskoot ja 92-eritelmät
Siemensin IFT5-sarjan kolmivaiheiset pysyvämagneettiset servomoottorit jaetaan vakio- ja lyhyttyyppisiin

Ac-servomoottori ja harjaton DC-servomoottori eron funktiona: ac-servo on parempi, koska se on siniaalto-ohjausta, vääntömomentin aaltoilu on pieni.Dc-servo on puolisuunnikkaan muotoinen aalto.Mutta dc-servo on yksinkertaisempaa ja halvempaa.
Suurnopeusakselin suurin nopeus ei ylitä 1500r / min
Vaihteen kehänopeus ei ylitä 10m / s;
Työympäristön lämpötila on -40 ° C -45 ° C;
Sitä voidaan käyttää sekä eteen- että taaksepäin.

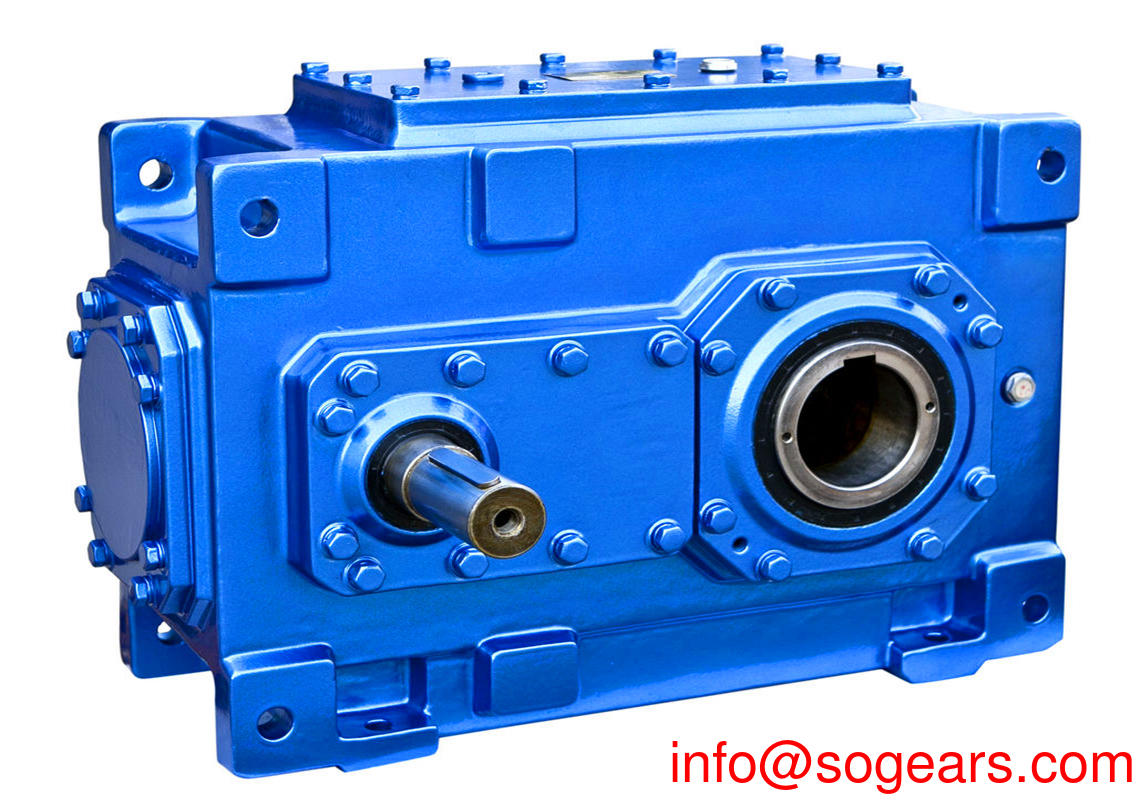
askelmoottori planeettavaihteisto tiedot:
NGW yksivaiheinen askelmoottori planeettavaihteisto: NGW11, NGW21, NGW31, NGW41, NGW51, NGW61, NGW71, NGW81, NGW91, NGW101, NGW111, NGW121
NGW kaksivaiheinen askelmoottori planeettavaihteisto: NGW42, NGW52, NGW62, NGW72, NGW82, NGW92, NGW102, NGW112, NGW122
NGW kolmivaiheinen askelmoottori planeettavaihteisto: NGW73, NGW83, NGW93, NGW103, NGW113, NGW123



NGW askelmoottorin planeettavaihteiston tekniset tiedot:
Tekniset tiedot askelmoottori planeettavaihteisto jaetaan 12-kehysnumeroihin siirtosuhteen, tehon ja vääntömomentin sekä yhden vaiheen, kaksivaiheisen ja kolmivaiheisen välityksen mukaan. On olemassa 27-kehysnumeroita ja 58-nopeussuhteita. Yksityiskohdat ovat seuraavat:
askelmoottori planeettavaihteisto jaetaan yksivaiheiseen, kaksivaiheiseen ja kolmivaiheiseen voimansiirtoon: yksivaiheiset mallit ovat: NGW11 askelmoottorin planeettavaihteisto NGW21, NGW31, NGW41, NGW51 askelmoottorin planeettavaihteisto NGW61, NGW71, NGW81, NGW91, NGW101, NGW111 , NGW121, NGWXNUMX;

Debug-menetelmä
1. Alustusparametrit
Alusta parametrit ennen johdotusta.
Ohjauskortilla: valitse ohjaustila;Palauta PID-parametrit nollaan;Sammuta aktivointisignaali oletuksena, kun ohjauskortti on kytketty päälle;Tallenna tämä tila varmistaaksesi, että ohjauskortti on tässä tilassa, kun se käynnistetään uudelleen.
Servomoottorissa: aseta ohjaustila;Aseta ulkoisen ohjauksen sallimiseksi;Kooderin signaalilähtön välityssuhde;Aseta ohjaussignaalin ja moottorin nopeuden välinen suhteellinen suhde.Yleensä suositellaan, että servotoiminnan suurin suunniteltu nopeus vastaa 9V: n ohjausjännitettä.Esimerkiksi yamyang asettaa nopeuden, joka vastaa 1V-jännitettä, ja tehdasarvo on 500. Jos haluat vain moottorin toimivan 1000 RPM: n alapuolella, aseta tämä parametri arvoon 111.


2, yhteys
Sammuta ohjauskortti ja kytke signaalilinja ohjauskortin ja servon välille.Seuraavat linjat on kytkettävä: ohjauskortin analoginen lähtölinja, aktivointisignaalilinja, servolähtön kooderin signaalilinja.Moottori ja ohjauskortti (sekä PC) saavat virran, kun johdotus on tarkistettu uudelleen oikeiksi.Tässä vaiheessa moottorin tulisi olla paikallaan ja sitä voidaan helposti kääntää ulkoisilla voimilla. Jos ei, tarkista aktivointisignaalin asetus ja johdotus.Kierrä moottoria ulkoisella voimalla, tarkista, pystyykö ohjauskortti havaitsemaan moottorin asennon muutoksen oikein, tarkista muuten johdotus ja kooderisignaalin asetus

3. Kokeile suuntaa
Jos suljetun silmukan ohjausjärjestelmässä takaisinkytkentäsignaali ei ole oikeaan suuntaan, seurausten on oltava tuhoisia.Ota signaali servon kytkemiseksi päälle ohjauskortin kautta.Tämän servon pitäisi pyöriä pienemmällä nopeudella, mikä on legendaarinen "nollapoikkeama".Ohjauskortilla on ohjeita tai parametreja nollapoikkeaman estämiseksi.Käytä tätä käskyä tai parametria nähdäksesi, voidaanko moottorin nopeutta ja suuntaa säätää tällä ohjeella (parametri).Jos sitä ei voida ohjata, tarkista analoginen johdotus ja ohjaustilan parametriasetukset.Vahvista, että annat positiivisen luvun, moottorin eteenpäin kääntyminen, anturimäärän kasvu;Negatiivisen luvun ansiosta moottori kääntyy takaisin ja kooderi laskee.Älä käytä tätä menetelmää, jos moottori on kuormitettu ja isku on rajoitettu.Testi ei anna liian suurta jännitettä, suositellaan kohdassa 1V.Jos suunta on epäjohdonmukainen, ohjauskortin tai moottorin parametreja voidaan muuttaa niiden yhdenmukaisuuden varmistamiseksi.

4. Estä nollapoikkeama
Suljetun silmukan ohjausprosessissa nollapoikkeamalla on tietty vaikutus säätövaikutukseen, ja on parempi rajoittaa sitä.Ohjauskortin tai servon ohjausparametrit nollapoikkeaman hallitsemiseksi, säädetään huolellisesti siten, että moottorin nopeus on lähellä nollaa.Koska nollapoikkeamalla itsessään on myös tietty satunnaisuusaste, joten moottorin nopeuden ei ole välttämätöntä vaatia olevan ehdottoman nolla.
5. Luo suljetun silmukan hallinta
Jälleen kerran servosignaali vapautetaan ohjauskortin kautta, ja ohjauskorttiin syötetään pieni suhteellinen vahvistus. Mitä pieni voitto on, se voidaan määrittää vain tunteen perusteella. Jos et todellakaan ole varma, kirjoita ohjauskortin sallima minimiarvo.Kytke ohjauskortin ja servon aktivointisignaali päälle.Tässä vaiheessa moottorin pitäisi pystyä karkeasti seuraamaan liikeohjeita.

6. Säädä suljetun silmukan parametreja
Ohjausparametrien hienosäätö sen varmistamiseksi, että moottori liikkuu ohjauskortin ohjeiden mukaisesti, on välttämätöntä, ja tämä työn osa, enemmän kokemusta, voidaan tässä vain jättää pois.
Muokkaa tämän osan suorituskykyvertailua kertaiseksi
Suoritusvoiman vertailu servomoottorin ja askelmoottorin välillä

Askelmoottorilla on avoimen silmukan ohjausjärjestelmänä olennainen suhde nykyaikaiseen digitaaliseen ohjaustekniikkaan.Askelmoottoria käytetään laajasti digitaalisessa ohjausjärjestelmässä Kiinassa.Täysin digitaalisen ac-servojärjestelmän ilmestyessä ac-servomoottoria käytetään yhä enemmän digitaalisessa ohjausjärjestelmässä.Sopeutuakseen digitaalisen ohjauksen kehitystrendiin askelmoottoria tai täydellistä digitaalista vaihtovirran servomoottoria käytetään liikkeensäätöjärjestelmässä moottorina.Vaikka nämä kaksi ovat samanlaisia ohjausmoodissa (pulssijuna- ja suuntasignaali), suorituskyvyssä ja sovelluksessa on merkittäviä eroja.Tee vertailu molempien palvelutasoon nyt.

Lähetyssuhde on: 2.0, 3.15, 3.55, 4, 4.5, 5, 5.6, 6.3, 7, 1.8, 9, 10, 11.2, 12.5;
Kaksivaiheisia malleja ovat: NGW42, NGW52, NGW62, NGW72, NGW82, NGW92, NGW102, NGW112, NGW122;
Lähetyssuhde on: 14, 16, 18, 20, 22.4, 25, 28, 31.5, 35.5, 40, 45.50, 56, 63, 71, 80, 90, 100, 112, 125, 140, 160;

Kolmitasoiset mallit ovat: NGW73, NGW83, NGW93, NGW103 vaihde askelmoottori planeettavaihteisto NGW113, NGW123 askelmoottori planeettavaihteisto;
Lähetyssuhde on: 180, 200, 224, 250, 280, 315, 355, 400













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![]()
Paras palvelu lähetysaseman asiantuntijalta suoraan postilaatikkoosi.
Palvelumme
Ota Touch
Yantai Bonway Manufacturer Co.ltd
ANo.160 Changjiang Road, Yantai, Shandong, Kiina (264006)
T + 86 535 6330966
W + 86 185 63806647